
I am a first year PhD student in Robotics at the Mohamed bin Zayed University of Artificial Intelligence (MBZUAI) with Prof. Xingxing Zuo, working on Computer Vision and Embodied AI.
My current research focuses on computer vision, Robot Manipulation, and Embodied AI, aiming to bridge the gap between simulation and reality through geometric and learning-based methods.
Prior to my move to Abu Dhabi, I obtained my master’s degree in Informatics at the Technical University of Munich (TUM) and bachelor’s degree in Computer Engineering at the Technical University of Berlin (TUB).
During my studies, I held two separate research assistant positions at the TUM Computer Vision Group: One project focused on shape matching, with Maolin Gao and Prof. Daniel Cremers. The other project focused on object trajectory generation, with Abhishek Saroha and Dr. Xi Wang. I also collaborate closely with Kaixin Bai and Lei Zhang at the Agile Robots. In addition, I worked extensively with Dr. Linh Kästner on several projects in social navigation for mobile robots at TUB and NUS.
If you are seeking any form of academic cooperation, feel free to drop me an email at huajian.zeng@mbzuai.ac.ae.
🔥 News
- 2025.08: Move to Abu Dhabi and join MBZUAI as a PhD student.
-
2025.05: We organized the Arena 2025 challenge of ICRA 2025 workshop Advances in Social Navigation: Planning, HRI and Beyond.
- 2025.01: 🎉Our paper on Arena-Rosnav 4.0 platform got accepted in ICRA 2025 in Atlanta, USA.
- 2024.11: 🎉Our paper on embedding learning for point clouds got accepted in 3DV 2025 in Singapore.
- 2024.04: 🎉Our paper on Arena-Rosnav 3.0 platform got accepted in RSS 2024 in Delft, Netherlands.
- 2023.07: I join Agile Robots
 as a compter vision intern in Munich.
as a compter vision intern in Munich. - 2023.06: 🎉Our paper on Arena-Rosnav 2.0 platform got accepted in IROS 2023 in Detroit, USA.
- 2023.04: 🎉Our paper on 2D DRL-based robot navigation simulator got accepted in Ubiquitous Robots 2023 in Honolulu, USA.
- 2022.10: Move to Munich and started my master’s study at TUM.
📝 Publications
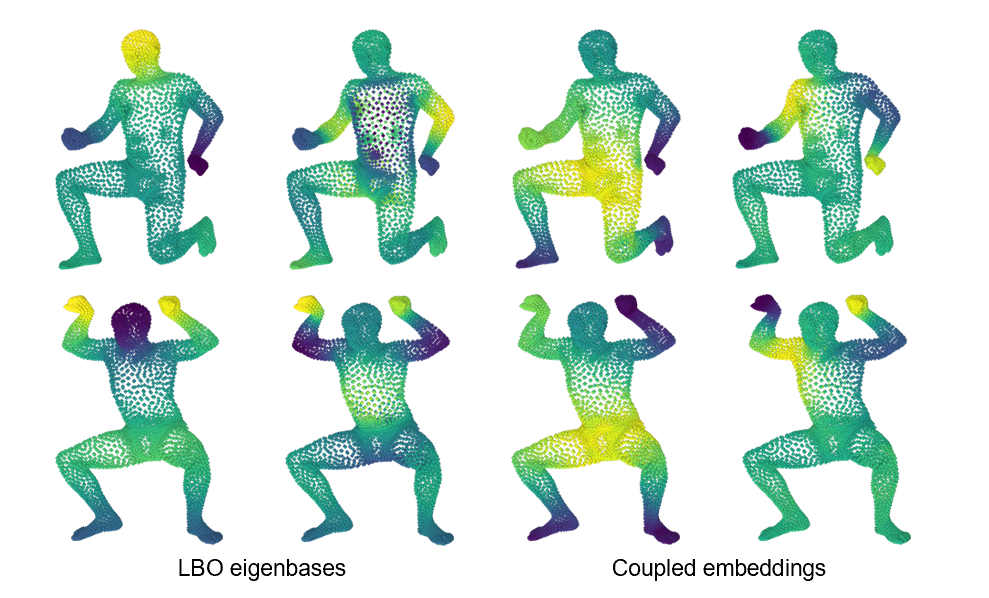
CoE: Deep Coupled Embedding for Non-Rigid Point Cloud Correspondences
Huajian Zeng, Maolin Gao, Daniel Cremers
- a novel deep coupled embedding learning method for dense non-rigid point cloud matching.
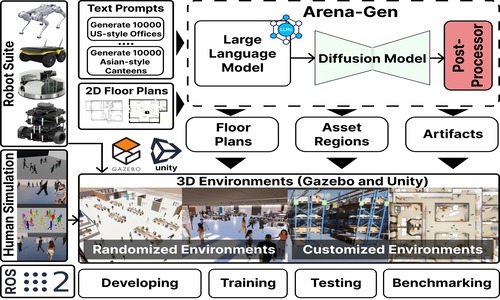
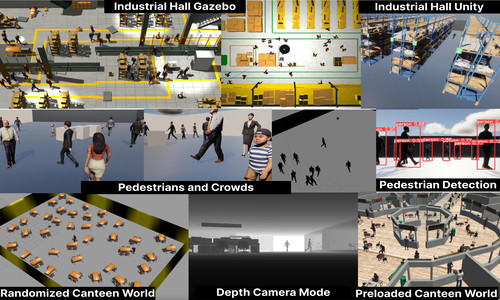
Volodymyr Shcherbyna, Linh Kästner, Diego Diaz, Huu Giang Nguyen, Maximilian Ho-Kyoung Schreff, Tim Seeger, Jonas Kreutz, Ahmed Martban, Huajian Zeng, Harold Soh
- A platform, integrating generative-model-based dynamic world generation, a semantically linked 3D model database, and extended human behavior simulation.
ClearDepth: Enhanced Stereo Perception of Transparent Objects for Robotic Manipulation
Kaixin Bai, Huajian Zeng, Lei Zhang, Yiwen Liu, Hongli Xu, Zhaopeng Chen, Jianwei Zhang
- Simulation data generation for photorealistic datasets of transparent objects based on Sim2Real.
- Stereo imaging algorithm for scene reconstruction of transparent objects using a novel cascaded ViT model
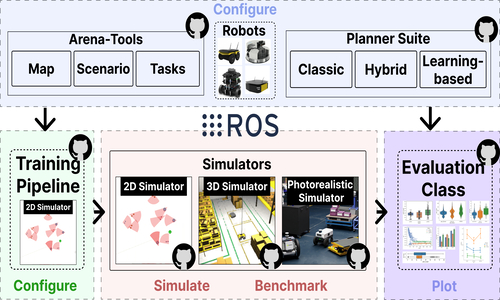
Arena 3.0: Advancing Social Navigation in Collaborative and Highly Dynamic Environments
Linh Kästner, Reyk Carstens, Huajian Zeng, Jacek Kmiecik, Tuan Anh Le, Teham Bhuiyan, Boris Meinardus, Jens Lambrecht
- A modular platform focused on human behavior modeling realism by integrating diverse social force models, task generation tools, and cross-simulator functionality abstraction.
Linh Kästner, Reyk Carstens, Huajian Zeng, Jacek Kmiecik, Tuan Anh Le, Teham Bhuiyan, Boris Meinardus, Jens Lambrecht
- A platform for developing and benchmarking robot navigation in highly dynamic environments.
Efficient 2D Simulators for Deep-Reinforcement-Learning-based Training of Navigation Approaches
Huajian Zeng, Linh Kästner, Jens Lambrecht
- Efficient 2D simulator for deep reinforcement learning (DRL)-based autonomous agent.
📖 Educations
- 2025.08 - 2029.07 (expected), PhD, Robotics, Mohamed bin Zayed University of Artificial Intelligence, Abu Dhabi.
- 2022.09 - 2025.02, Master, Informatics, Technical University of Munich, Munich.
- 2019.10 - 2022.09, Undergraduate, Computer Engineering, Technical University of Berlin, Berlin.
🎖 Honors and Awards
- 2024.10 Deutschestipendium 2024/2025
📚 Academic Services
- Conference Reviewer: ICRA, IROS
💻 Internships
- 2023.07 - 2024.05, Agile Robots, Munich.
🤝 Volunteer Works
- 2024.06 - 2024.07, UEFA Euro 2024, Munich.